![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
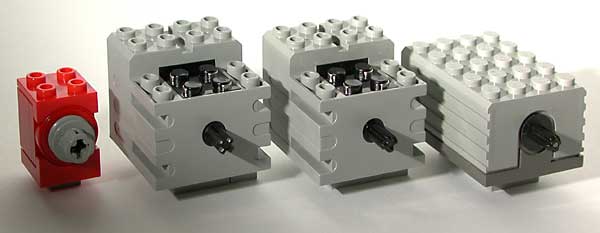
LEGO® 9V Technic Motors compared characteristics
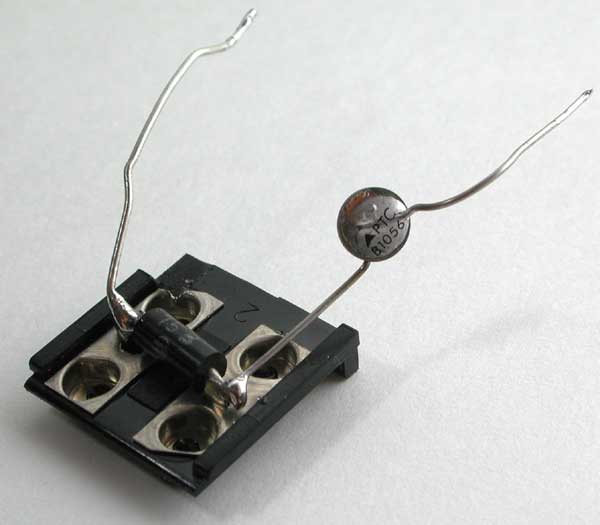
- a PTC thermistance (here an Epcos B1056). This resistor, mounted in series with the motor, has a low value when it is cold (about 1.7 ohms), rapidly increasing as temperature rises. When large current flows through the motor, self heating rises thermistance temperature and resistance value, so the current is limited by voltage drop across thermistance.
- a BZW04-15B, bidirectional transient voltage suppressor diode. This diode protects RCX from large voltage spikes that could be generated by the motor. But it also forbids applying more than 15V to the motor...
- Micromotor 2986 is at its best when space or weight is at a premium. But its mechanical power is quite low.
- Technic motor 2838 is a real power hog, with poor efficiency, but it can deliver 30% more power than Minimotor.
- Minimotor 71427 is probably the best performer of the pack overall.
- The new 43362 is roughly equivalent to 71427, with slightly degraded performances. But its light weight can be a boon for many uses.
- Clear case 47154 provides a higher mechanical power than 71427, but at the price of a somewhat lower efficiency.
- RC Race Buggy Motor 5292 is really powerful, but requires a power supply up to the task. It's not a good idea to use it with a RCX as the 500 mA current limitation won't let it unleash its power...
- NXT motor delivers a high torque thanks to its internal speed reduction gear train. Because of that, it also turns slowly and efficiency is somewhat reduced. This motor could be connected to RCX thanks to a compatibility cable, but this is not recommended for use on a RCX because the high current it can consume is too much for RCX 500 mA current limitation.
- The Power Functions train motor has widely improved
characteristics compared to the older RC train motor.



See also this comparison page.
Thomas Avery has also performed measures on 5292 motors, see Lugnet thread.
The roster
|
Electric Technic Motor 9V Lugnet Partsref 2838c01, Peeron 2838c01, Lego 74569 The older 9V Technic motor (1990). Ungeared, it has a high rotation speed and low torque, so for most applications it requires an external gear reduction. |
|
Electric Technic Micromotor Lugnet Partsref 2986, Peeron 2986, Lego 70823 Appeared in 1993, this small, light weight motor turns slowly and offer low torque - but respectable torque for its size. Must be used generally with pulley, top and base, but other motion transmissions are possible (see examples by Brian Sadowsky, with a 16t gear/clutch or a pin joiner) |
|
Electric Technic Mini-Motor 9v Lugnet Partsref 71427c01, Peeron 71427c01, Lego 71427 Since 1997, this motor replaces 2838. Geared down and quite efficient, this is the motor of choice for most applications. |
|
Electric Technic Mini-Motor 9v Lego 43362 In 2002, Lego replaced 71427 motor with a new type, 43362. Externally almost identical, its internal structure is very different. Performances are almost as good, and its weight is much lower. |
|
Electric RC Race Buggy Motor (data
updated on Augus 15, 2012: some values were all
wrong!) |
|
Electric Technic Motor 9V Geared This motor was first included in 4094 Motor Movers set (2003). Provides an axle hole with friction, allowing to choose axle length without the need of an extender. Flat bottom allowing easy mounting. |
|
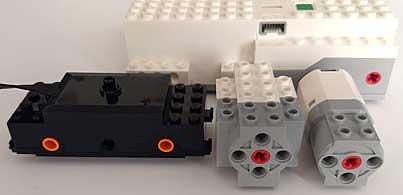
NXT motor This motor is specific to the NXT set (2006). Includes a rotation encoder, returning to the NXT the position of the shaft with 1° resolution. Because of the special connector of this motor (non-standard phone plug type), a cable adapter is required to drive this motor with regular 9V sources. Not recommended for use with a RCX which can't deliver the high current that this motor can consume. Slow rotation speed, minimizing the need of external gear train. |
|
Power Functions E-motor Introduced with LEGO Education Renewable Energy Add-On Set (9688), the strong point of this motor is that it can be easily back-driven and used as a generator. Its high speed may be also useful in some applications. But its efficiency is no better than PF-Medium, and delivered mechanical power is about half. |
|
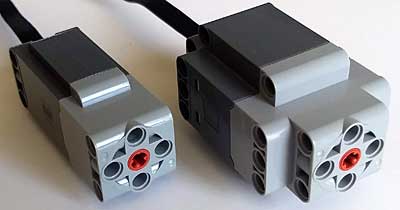
Power Functions Medium motor This motor belongs to a new range of motors and control elements introduced in 2007, the Power Functions. It uses a new 4 pins 9V connector that provides permanent 9V supply to control elements as well as controlled power to the motors (compatibility with old 9V system is built in extension cords). The Medium motor has holes for studless constructions as well as 6x2 bottom plate. |
|
Power Functions XL motor Big brother of Power Functions Medium motor, it provides a lot of mechanical power. Actuated by the same core as NXT motors, it rotates slightly faster (less internal gear reduction). Mounting is done through several pin holes. |
|
Power Functions Large motor This motor appeared first in Rock Crawler set (9398). Significantly more powerful than the medium motor, it packs a lot of power in a light, small package with many convenient mounting options. But it's efficiency at light load is pretty low (large current at no-load). |
|
9V Train motor Stefan Vorst measured performances of the 9V Train motor. The results are below. |
|
RC Train motor This motor was introduced when LEGO stopped the 9V train with metal tracks. The performances of this motor are... not so good. |
|
Power Functions Train motor As the train system unifies with Power Functions, this motor, equipped with a PF cable and connector, replaces the RC train motor. Fortunately the performances are much improved, with an efficiency and power even exceeding the old 9V train motors. |
|
EV3 Large motor This motor is very similar to NXT motor, but with slightly better fixing capability (compatible with Technic frames, holes aligned with hub). Its efficiency seems slightly lower. |
|
EV3 Medium motor This motor is one of the highlights of EV3 set compared to NXT one: a motor of reduced size and classical front axle hub. Reduced size comes with reduced power, similar to PF medium motor (but being more down-geared, it is slower and delivers more torque). |
|
Powered Up Medium This one is the evolution of PF-Medium motor, but with the LPF2 / Powered Up connector. It has very similar characteristics as its predecessor. One less Technic pin hole on front, but studs on top... |
|
Powered Up Train motor This is the new version of train motor, but with the new LPF2 / Powered Up connector. It has very similar characteristics as its predecessor. My measurements shows a higher internal friction (increased current/lower maximum speed) but this is probably caused by individual variation (tested on one sample only) |
|
Boost Internal motor I was able to open my move hub and test the internal motor. This one is rather powerful, but no load current is pretty high! |
|
Boost External motor This motor comes with the Boost set and uses LPF2 connector. Mechanical power is a bit lower than Powered Up Medium, but more internal down gearing allow to get a slightly higher torque. But the main difference is that this motor includes a rotation encoder with 1° resolution. |
|
Control+ L motor |
|
Control+ XL motor |
|
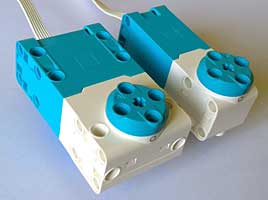
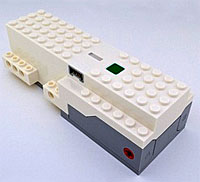
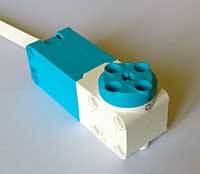
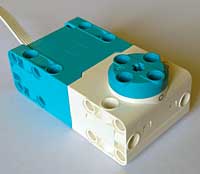
Spike Prime Medium motor |
|
Spike Prime Large motor |





















Weight
|
|
|
|
|
|
|
|
|
|
|
|
48g |
10g |
42g |
28g |
55g |
40g |
80g |
50g |
31g |
69g |
72g |
53g |












|
|
|
|
|
|
|
|
|
|
|
|
57g |
42g |
82g |
39g |
57g |
34g |
43g |
- |
53g |
76g |
49g |
71g |












Supposed to be equivalent to 71427, 43362 motor is 30% lighter. This is generally an advantage, except when the motor is used as a counterweight, or to balance the structure, for example in COG-shifting walkers.
No-load characteristics
Test conditions: motor is powered by a variable, regulated
power supply. An ammeter measures current flowing through the
motor, a voltmeter monitors tension across. The rotation speed
is measured by a RCX equipped with a light sensor, looking at
an half-white/half
black cylinder.
9 V supply |
|
|
|
|
|
|
|
|
|
|
|
|
Rotation
speed |
4100 rpm |
35 rpm |
360 rpm |
340 rpm |
1700 rpm |
460 rpm |
170 rpm |
780rpm |
405 rpm |
220 rpm |
2000rpm |
2000rpm |
No-load current |
35 mA |
6 mA |
3.5 mA |
9 mA |
160 mA |
31 mA |
60 mA |
17.5mA |
65 mA |
80 mA |
90mA |
90mA |
9 V supply |
|
|
|
|
|
|
|
|
|
|
|
|
Rotation
speed |
1900rpm |
390 rpm |
175rpm |
260 rpm |
1760 rpm |
380 rpm |
255 rpm |
350 rpm |
315 rpm |
330 rpm |
228 rpm |
213 rpm |
No-load current |
90mA |
120 mA |
60mA |
80 mA |
100 mA |
60 mA |
41 mA |
140 mA |
120 mA |
60 mA |
100 mA |
110 mA |
43362 has a higher no-load current than 71427, probably
caused by higher internal
friction. 47154 has a fairly high no-load current, because
of its 5-stages gear reduction. But it uses big-tooth gears
in the last stages, probably much more sturdy that the 2-stages,
thin-tooth 71427/43362 internal gearing. The 5292 also exhibit
very high no-load current, here again caused by internal friction.
This explains also the break in its speed/voltage curve. All
train motors show similar no-load characteristics, especially
a relatively high current.
As is usual for DC motors, rotation speed is proportional
to voltage applied to them, this can be seen on graphs below.
No-load current depends little on voltage.
Stalled characteristics
Stalled current consumption is simply measured with motor
axle shaft locked by hand. Stalled torque is established from
the maximum weight that can be lifted by the machine described
below. Note that stalled torque value is VERY imprecise.
9 V supply |
|
|
|
|
|
|
|
|
|
|
|
|
Stalled torque |
0.85 N.cm |
1.6 N.cm |
6 N.cm |
5.5 N.cm |
14 N.cm |
6 N.cm |
50 N.cm |
3.4N.cm |
11 N.cm |
40 N.cm |
2.8 N.cm |
1.7 N.cm |
Stalled current |
700 mA |
80 mA |
360 mA |
340 mA |
3.2 A |
580 mA |
2 A |
410 mA |
850 mA |
1.8 A |
950 mA |
750 mA |
9 V supply |
|
|
|
|
|
|
|
|
|
|
|
|
Stalled torque |
3.6 N.cm * |
18 N.cm |
43 N.cm |
15 N.cm |
2.9 N.cm * |
11 N.cm ** |
9.5 N.cm ** |
15.8 N.cm |
26 N.cm *** |
22 N.cm *** |
13.5 N.cm |
33.5 N.cm |
Stalled current |
1.3 A * |
1.3 A |
1.8 A |
780 mA |
1.1 A * |
0.8 A ** |
450 mA ** |
1050 mA |
1.4 A *** |
1.1 A *** |
0.85 A |
1.8 A |
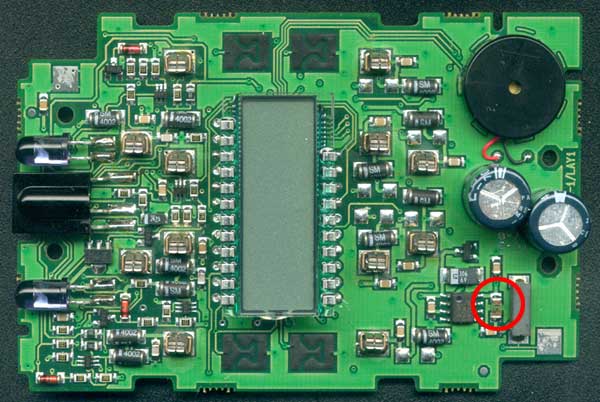
Take care to avoid extended period stall condition, as power dissipated in motor case is quite high (6 Watts for 2838, 3 W for 71427) will cause a rapid temperature rise. Note that 71427 and 43362 motors, equipped with a thermistor, should be protected against frying (not tested though !!!). 5292 motor is protected too, since stalled current decreases quickly (It's the rectangular yellow component on this photo. 47154 protection can be seen easily through clear case.
The NXT motor is also protected by a thermistor (Raychem RXE065 or Bourns MF-R065). That means that the high 2A current (and associated whooping torque) can be sustained only for a few seconds. Same thing for the Power Functions XL motor.
(*) The train motors also contain thermistor limitations. For the PF train motor, this protection trips too fast and prevents direct measure of the stalled current. These values were obtained by extrapolation.
(**) Powered Up medium motor and Boost external motor have fast tripping thermistor limitation, that seem to trip at a fairly low current (around 400mA), that prevents direct measurement of stall current and torque. These values are thus obtained by extrapolation (and is not really meaningful for Powered Up medium motor that can be feed only with half the stall current).
(***) Control+ motors stalled current was also obtained by extrapolation.
Here is the setup used to measure motors under load. Electrical power is measured with voltmeter and ammeter. Mechanical power delivered by the motor is evaluated from the time used to lift the weight by some height (5 cylinder turns - the first two turns are not counted to eliminate initial acceleration). Torque applied is obtained from weight and cylinder radius.
Cylinder is directly placed on motor axle shaft, except for 2838 motor where a 1/5 gear reduction was used. Additionnal friction introduced may have somewhat impacted 2838 efficiency, but anyway this gearing is necessary for most applications. Torque displayed for this motor corrects gear reduction. The fast 5292 motor, the PF and RC train motors were also measured with a 1/3 gear reduction.

In 2010 I updated my test setup to the NXT platform: Mindsensors launched the PowerMeter sensor that allows the NXT to measure directly the voltage applied to the motor and the current consumed. A light sensor in front of a black and white cylinder reads the number of turns done by the winch, and the time needed to lift the weight. Using custom board with two electromechanical relays, the NXT can control the motor under test: run, float or brake (this later state is used to prevent the load to drop brutally on the floor at the end of lifting). A laboratory power supply is used to power the motor under test.

The photo below shows the NXT equipped with PowerMeter sensor and motor control board.
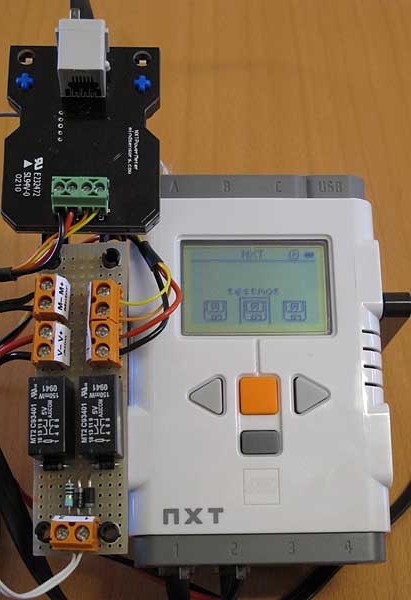
Here is a screen capture of the NXC motor test program:
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
The speed of 43362 motor is about 12 % lower than speed of 71427. Though this is in the range of variations measured by Steve Baker among a bunch of nine 71427 motors, my measures on three 71427 and two 43362 showed the 12 % difference between the two groups.
The RC train motor had a poor efficiency and delivers little torque at low voltage (it was not able to move under 6V loaded with 0.85 N.cm). The PF train motor has a much improved efficiency, even better than the old 9V train motor.
Spike motor don't have an outstanding efficiency (Spike medium motor fares quite bad in that respect. I quoted in yellow the "official" values provided by LEGO Education in their datasheets. As you can see the values match pretty well my measurements (and no, I didn't have to adjust my figures to fit LEGO values ;) )
Speed and current vs. torque
Curves showing rotation speed vs. torque and current consumed vs. torque, both at nominal 9V voltage.

These charts summarize the above curves. The most meaningful shows the various motor sorted by maximum power they are able to deliver at 9V. Because rpm/torque curve is linear a motor provides maximum power when load slows it down to half of no-load speed.
The following charts sort motors by torque and by no-load rotation speed (of course this depends a lot on internal down-gearing of the motors!!!). Torque chart lists torque at half speed point.
Protections
71427 and 43362 motors are protected from abuses by two devices:
A similar protection is integrated in 47154 motors, as can be seen on this photograph. NXT motor is also protected with a PTC thermistance and a transient voltage suppressor diode (D4 on this photograph).
Outputs of RCX are also protected from overload: the motor driver chip used (Melexis MLX10402 - datasheet) has a current limitation set to 500 mA, and a thermal shutdown which disable the output if die temperature rises too much.
Here is the curve limitation that I measured on a RCX. It was powered by an external regulated power supply, and tested at 9V (6 alkaline batteries) and 7.2V (6 NiCd or NiMH rechargeable batteries).
There is a significant voltage drop before reaching current limitation knee (at about 500 mA). So a stalled 71427 motor receives only about 7V at 300 mA, while two paralleled 71427 or a single 2838 almost reach current limitation (5.5V / 430mA).
Once current limitation is established (for example with a dead short), power dissipation in the driver is very high, and it quickly enters thermal shutdown mode. After that, the output cycles on/off with a period of about 1 second: the driver circuit heats up, stops output, cools down, re-enables output, heats up again and so on.
You can also see on the graph that with a dead short, the output can deliver slightly more than 500mA. So if all three outputs are shorted, total consumed current is more than 1.5A, exceeding rating of the fuse that protects RCX. This condition should not happen in normal circumstances, even with all three outputs loaded with 2 stalled 71427 motors...
I also had a look to current output capabilities of 8475 RC Race Buggy. Its main output drives two paralleled 5292 motors that consumes more than 3A when stalled so it has to be beefy ! And indeed it seems to have a current limitation of about 4A, and a thermal shutdown providing on/off cycling like RCX motor driver.
Getting maximum mechanical power from RCX output
October 2012 update: Similar curves for Power Functions motors driven by PF IR-receiver are available here.
Using an illimited power supply (fresh batteries for example), a DC motor provides maximum mechanical power when loaded at half of its stall torque. This is also the load where rotating speed is half of no-load speed (this assumes ideal conditions such as low internal friction, but according to load curves showed above, this is exact enough to be useful).
But with RCX output, some voltage drop occur as current increases, and current limitation can also trigger in if two motors under heavy load are paralleled on the same output.
Here are the curves showing mechanical power versus load torque for various motor combinations. The RCX was externally powered from a regulated power supply, and I measured mechanical power at 9V (equivalent to 6 alkaline batteries) and 7.2V (6 NiCd or NiMH rechargeable batteries).
|
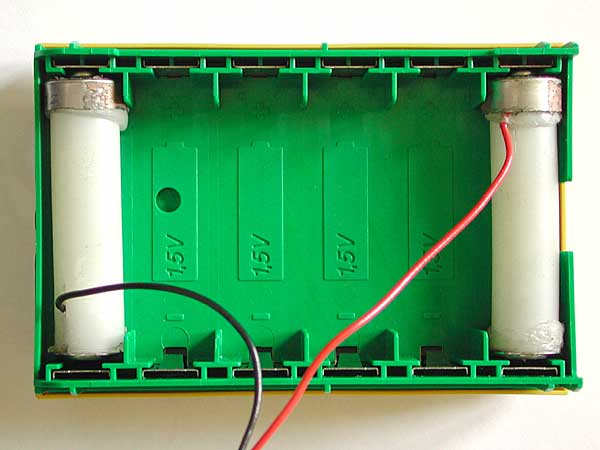
RCX powered by an external regulated power supply through two fake batteries. Caution: I shall not be held responsible if you burn your RCX with incorrect voltage or bad polarity ! |
|
The fake batteries where assembled from the sawed ends of old alkaline batteries, maintained at the right spacing with rods of hot melting glue. Caution: batteries contain hazardous chemicals that can be dangerous for your health. Open them at your own risk and only if you know what you are doing!!! |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
You can see from the curves that although RCX can be operated from NiMH batteries, the lower supply voltage translates in a 40% cut down of available mechanical power .
Single motor curves
Paralleled motors curves
Two identical motor are powered from the same RCX output, and their shaft are mechanically coupled.
Because of the higher current consumption of 47154 and 2838 motors, using two of them on the same RCX output is not recommended, as they exceed RCX current limitation when heavily loaded. At 0.8 W, tandem 71427 provide safely the greatest mechanical power of all.
Conclusion
Each of these motors has unique characteristics which makes it more or less suitable for different applications.
Caution
! Though I tested motors with a 12V supply, |
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()