![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Spy
Camera Rover 
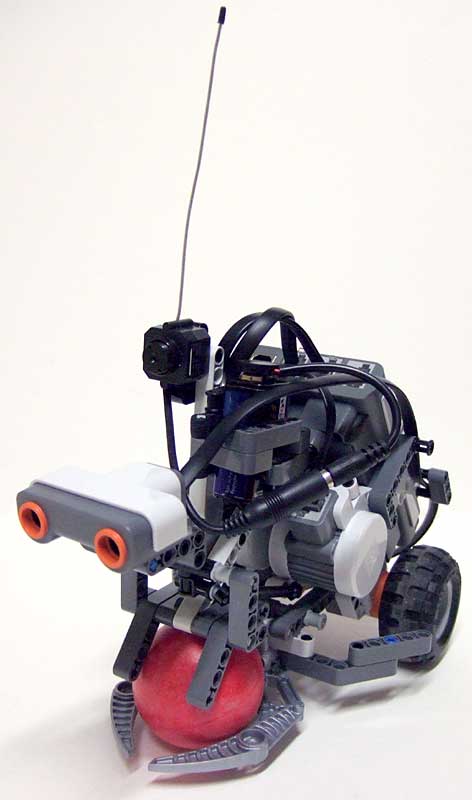
I started building this little rover to test Brian Davis' ball caster. While I was the first to demonstrate the use of NXT ball as a caster, Brian design is far superior to mine... Then I got my wireless camera and used the rover to remotely explore my house. It can either be remote controlled using my NXT joystick (or any other Bluetooth remote control program, see bottom of this page), or wander by itself, using the ultrasonic sensor to avoid obstacles.
|
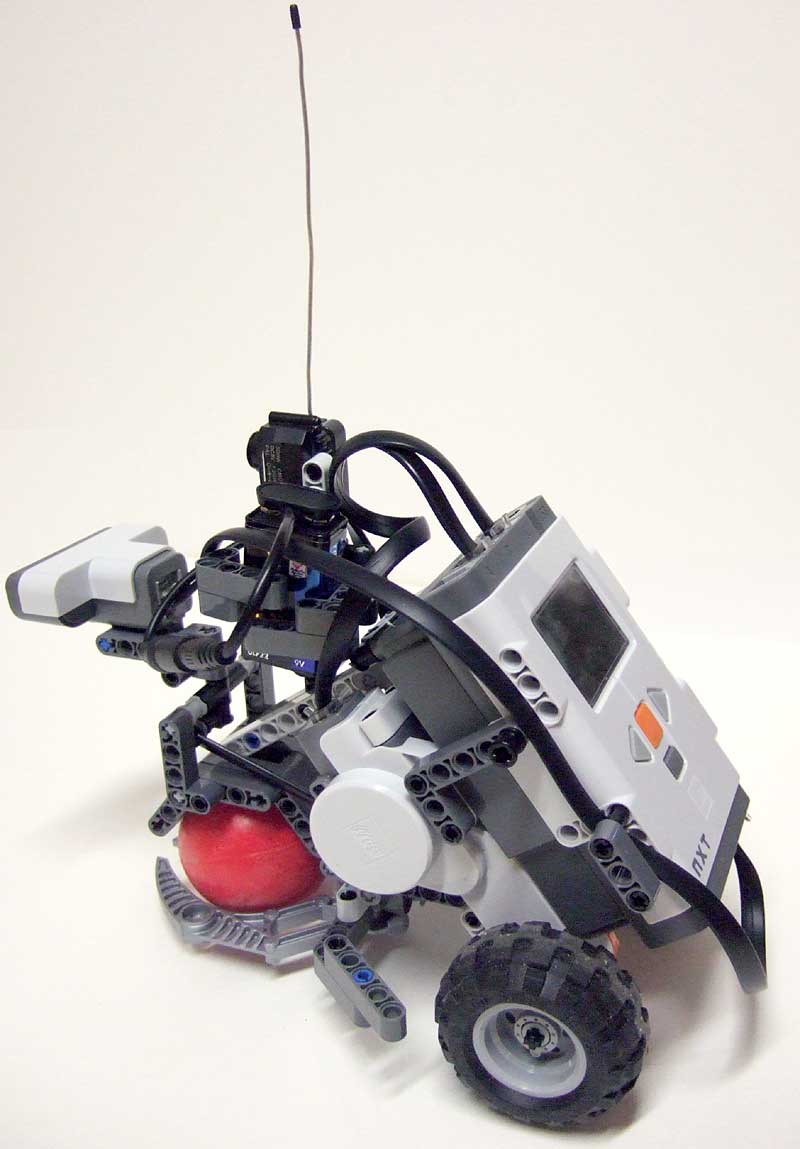
Side view of the rover. |
|
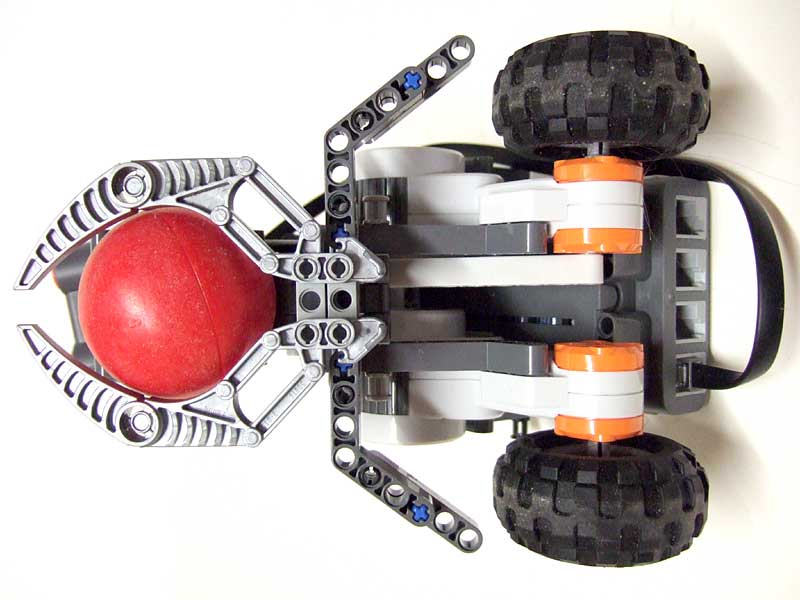
Bottom view. The white beam in the middle transmit movement from right motor to ultrasonic sensor assembly. Thanks to this linkage, the sensor sweeps from left to right. This increase obstacle detection field width, and minimize the chance of being in a sensor "blind incidence" (as you probably noticed, a flat wall approached at 45° may remain undetected). |
|
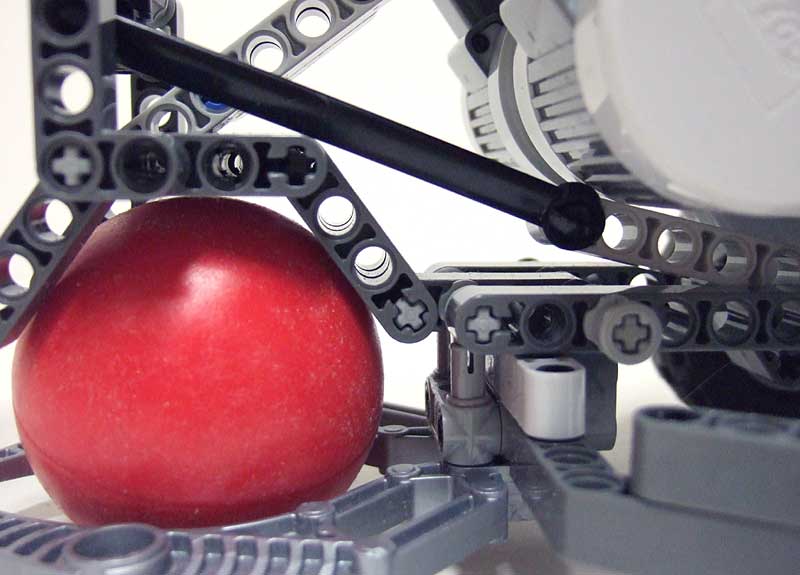
Detail of the ball caster, also shows the linkage between motor and ultrasonic sensor. |
|
Close-up on the camera and on battery holder. I tried to power the camera from the NXT third motor output, but voltage was too low as I use NiMH batteries. It might have worked with alkaline cells. |
|
The tiny camera itself. I epoxy-glued it to a L-shape beam for easy integration with my LEGO models. The transmission frequency is 1.2GHz that should not interfere with the 2.5GHz of NXT Bluetooth. The range is similar to Bluetooth (about 10m in my house). |
|
The camera next to the receiver. This is a purely analog device, providing video and audio connectors to be connected directly to a TV set. If you want to get the video on your computer, you will need to add a video digitizer. |
|
Movie shot from the rover (Divx5, 4Mb). Quality is correct for something I bought for about 30 Euro on eBay. |




Building
instructions
|
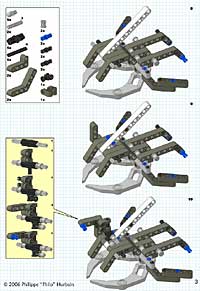
Printable building instructions (PDF, 1.7Mb). LDraw/MLCad MPD file. |
Programs
A few simple NXT-G programs I have written for the rover:
|
"US-avoid" program allows the rover to wander around your room, avoiding obstacles thanks to the ultrasonic sensor. If something is too close, the rover backs up while turning randomly left or right. Simple but effective... |
|
"Remote" program enable the rover to be remotely controlled by my NXT joystick through Bluetooth link. When you press the trigger button, the rover plays an R2D2 sound... (place this sound file in your C:\Program Files\LEGO Software\LEGO MINDSTORMS NXT\engine\Sounds folder). The NXT joystick must be running the "Joystick" program. |
|
"Remote-bidi" program is similar to the previous one, but constantly sends ultrasonic sensor distance to the NXT joystick. Unfortunately, changing direction of the Bluetooth link takes time, and the rover is much less responsive with this program (and harder to control). The NXT joystick must be running the "Joystick-bidi" program. |
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()